
Physical interpretation of impulse response and its transfer function
I have tried to verify how the function g(t) in the time domain between system inputs and outputs has characteristics depending on the input signal. For this verification, we need an impulse response, so let's start with the main points about an impulse signal. Impulse response is not something we are usually aware of when […]

Tutorial to Feedback Control [ARM used in Practice]
Table of contents1 Control Theory Used in Practice1.1 Preparation1.2 Analysis1.3 Application1.4 Advanced1.5 Extra edition1.6 Multilateral Interpretation2 Motion Control Applications2.1 Open-Loop PWM Control2.2 Speed Feedback Control2.3 Robust Speed Control2.4 Speed Servo Control2.5 Positioning Servo Control[Acceleration-reference]2.6 Positioning Servo Control[Pulse-reference] Control Theory Used in Practice What comes to mind when you hear the word "Control"? Although the image […]
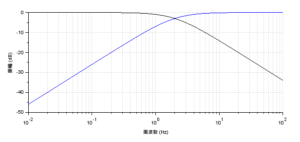
Let's clarify the mechanism of the complementary filter [acceleration/gyro sensor]
Complementary filters are often used to combine accelerometers and gyroscopes, but there are few explanations on the details of these filters. It is interesting to know how the complementary filter equation is derived and what the equation means. I will explain the calculation process to show that there is a deep meaning in a relatively […]

Posture detection by accelerometer and gyro sensor [STM32Nucleo]
The GY-521 Sensor Board with Accelerometer and Gyro Sensor (MPU-6050) can easily acquire 3-axis acceleration and 3-axis gyro data via I2C interface, and is recommended for its high information content and low cost. However, most of the information on the Internet is for Arduino, and while the programming can be easily utilized by anyone using […]

Build a pulse-following positioning servo control system using Microcontroller
So far, I have realized positioning motion control using the acceleration command method as a method to follow a motor position trajectory created in advance, and confirmed the effectiveness of this operation. Many actual motor positioning servo systems give pulses as positioning commands. Therefore, in this article, I will try to realize a positioning system […]

Build a positioning control servo system of DC motor using Microcontroller for practical use
In the previous issue, I applied the PI control method, High-gain feedback method, and 2-degrees of freedom robust method introduced on this site to realize practical speed servo operation with MCU using the LEGO EV3 motor as a theme, and verified the characteristics of each method on an actual device. This time, as a further […]

Build a speed servo control system for DC motor using Microcontroller for practical use
So far, I have checked the characteristics of each of the LEGO EV3 motor using DC motor with step response (constant value input) of various control methods. In actual operation, the motor is not only used at a constant speed, but is also used in many applications for so-called servo operation, in which acceleration and […]

Build a robust speed control system for DC motor using Microcontroller for practical use
I will try to apply PI speed control and 2-degree of freedom robust control to a LEGO EV3L motor with an encoder attached to the load side through gears to verify their operating characteristics and effects. I would like to actively adopt these controls if they are easy to implement and effective, even for simple […]

Build a practical speed feedback control system for DC motor using Microcontroller
With a commercially available driver, the speed of a voltage-controlled DC motor can be easily controlled in an open loop according to the duty ratio when a PWM pulse output from MCU is given. The speed is almost proportional to the duty ratio, but this is the case under no-load operating conditions. The limitation of […]

Speed control of DC motors using Microcontroller PWM output [Open-loop control]
Using the L-motor of the LEGO® MINDSTORMS EV3, the STM32Nucleo board will actually operate the motor. The EV3 motor has a built-in encoder, so you can not only monitor the speed, but also get feedback for more advanced operation. First, as a starting point for motion control using MCU, I would like to try open […]