
Physical interpretation of impulse response and its transfer function
I have tried to verify how the function g(t) in the time domain between system inputs and outputs has characteristics depending on the input signal. For this verification, we need an impulse response, so let's start with the main points about an impulse signal. Impulse response is not something we are usually aware of when […]

Tutorial to Feedback Control [ARM used in Practice]
Table of contents1 Control Theory Used in Practice1.1 Preparation1.2 Analysis1.3 Application1.4 Advanced1.5 Extra edition1.6 Multilateral Interpretation2 Motion Control Applications2.1 Open-Loop PWM Control2.2 Speed Feedback Control2.3 Robust Speed Control2.4 Speed Servo Control2.5 Positioning Servo Control[Acceleration-reference]2.6 Positioning Servo Control[Pulse-reference] Control Theory Used in Practice What comes to mind when you hear the word "Control"? Although the image […]
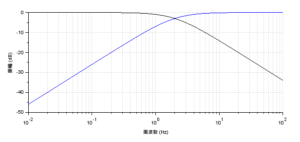
Let's clarify the mechanism of the complementary filter [acceleration/gyro sensor]
Complementary filters are often used to combine accelerometers and gyroscopes, but there are few explanations on the details of these filters. It is interesting to know how the complementary filter equation is derived and what the equation means. I will explain the calculation process to show that there is a deep meaning in a relatively […]

Posture detection by accelerometer and gyro sensor [STM32Nucleo]
The GY-521 Sensor Board with Accelerometer and Gyro Sensor (MPU-6050) can easily acquire 3-axis acceleration and 3-axis gyro data via I2C interface, and is recommended for its high information content and low cost. However, most of the information on the Internet is for Arduino, and while the programming can be easily utilized by anyone using […]

Build a pulse-following positioning servo control system using Microcontroller
So far, I have realized positioning motion control using the acceleration command method as a method to follow a motor position trajectory created in advance, and confirmed the effectiveness of this operation. Many actual motor positioning servo systems give pulses as positioning commands. Therefore, in this article, I will try to realize a positioning system […]

Fundamentals of Feedback Control using Microcontroller [Advanced]
In "Fundamentals of Feedback Control using Microcontroller [Application]" I explained PID control, which is used in practice based on classical control theory. PID control is easy to use in the field when the model to be controlled is relatively simple, because the gain can be set sensibly. However, when the influence of parts that could […]

Fundamentals of Feedback Control using Microcontroller [Application]
In "Fundamentals of Feedback Control using Microcontroller (Analysis)" I have explained the means to improve the characteristics of a control object by modeling it with mathematical formulas and applying feedback, and to improve the tracking of output to a target value by using mathematical formulas as control theory. From now on, I would like to […]
Fundamentals of Feedback Control using Microcontroller [Analysis]
In "Fundamentals of Feedback Control using Microcontroller [Preparation]" I provide an overview of feedback control and a summary of the process up to the point where the modeled control object is Laplace transformed into complex s-space and a transfer function is created. In this [Analysis] section, I will explain how to read block diagrams and […]

Fundamentals of Feedback Control using Microcontroller [Preparation]
I have summarized in my own way the outline of control theory, which will expand the world of design and development if it is mastered in order to realize motion control using embedded MCUs. This is not a sequence control in which commands are executed in order as in programming, but a feedback control in […]

Actual function of coils and capacitors
The electrical circuits that make up MCU interface are mainly DC circuits, so they are relatively simple, obeying Ohm's law with resistance as the load. However, when it comes to AC circuits, the story is different. This is because the coils and capacitors used in the circuits have a characteristic called impedance, which is the […]